高精度定位需求正随着自动驾驶、无人机、机器人和数字孪生技术的发展快速增长。传统 GPS 导航虽然能够满足日常导航需求,但对于自动化设备而言,数米级误差往往难以满足实际应用要求。因此,能够提供厘米级定位能力的 RTK 技术逐渐成为智能设备的重要基础设施。
在高精度定位产业中,RTK 已成为测绘、农业自动化、工业机器人和自动驾驶系统的核心技术之一。GEODNET 则通过去中心化基础设施模式,将 RTK 服务从传统区域性网络扩展为全球化网络,为更多设备和开发者提供高精度定位能力。
RTK 定位技术是什么?
RTK(Real-Time Kinematic,实时动态定位)作为一种利用卫星导航信号载波相位测量实现高精度定位的技术。
普通 GNSS 接收机通常依赖卫星广播信号直接计算位置,其定位精度一般在数米范围内。而 RTK 通过引入固定位置的基准站实时计算误差,并将修正数据发送给移动终端,从而显著提高定位精度。
RTK 技术能够将定位误差从米级降低至厘米级,因此被广泛用于需要高精度导航和测量的场景。
为什么普通 GPS 会产生定位误差?
普通 GPS 定位误差主要来源于多个因素共同影响。
卫星轨道误差
卫星在轨运行过程中会出现轨道偏差,导致计算位置时产生误差。
电离层与对流层延迟
卫星信号穿过大气层时会受到电离层和对流层影响,从而改变传播速度。
多路径效应
卫星信号经过建筑物、山体或地面反射后进入接收机,会导致测量结果偏离真实位置。
接收机误差
不同设备硬件性能和算法能力也会影响最终定位结果。
这些误差叠加后,使普通 GPS 的定位精度通常维持在数米范围内。
RTK 如何实现厘米级定位?
RTK 的核心在于利用基准站提供实时误差修正。
基准站安装在已知坐标位置,因此能够准确计算自身接收到的卫星信号与理论值之间的差异。这些差异被转换为修正数据后,通过网络发送给附近的移动终端设备。移动终端在接收卫星信号的同时接收修正数据,从而消除大部分误差,实现厘米级定位。
这一过程通常在数秒内完成,因此被称为实时动态定位。
GNSS、GPS 与 RTK 有什么区别?
许多用户会将 GNSS、GPS 和 RTK 混为一谈,但三者并不属于同一概念层级。
GNSS 是全球导航卫星系统
GNSS(Global Navigation Satellite System)是全球导航卫星系统的统称。
目前主要包括:
-
GPS(美国)
-
GLONASS(俄罗斯)
-
Galileo(欧盟)
-
BeiDou(北斗)
GPS 是 GNSS 的组成部分
GPS 是最早被广泛应用的全球卫星导航系统之一。
日常使用中提到的 GPS 导航,实际上通常同时接收多个 GNSS 系统信号。
RTK 是高精度定位技术
RTK 并不是卫星系统,而是一种基于 GNSS 信号进行误差修正的定位方法。
因此可以理解为:GNSS 提供卫星信号;GPS 属于 GNSS 系统之一;RTK 则利用 GNSS 信号实现厘米级定位。
RTK 网络由哪些组成部分构成?
完整的 RTK 系统通常由多个部分共同组成。
基准站(Base Station)
基准站负责持续接收卫星信号并计算误差。
修正数据服务器
服务器负责处理基准站数据并生成标准化修正信息。
通信网络
互联网或无线通信系统负责将修正数据传输至终端设备。
Rover 终端
Rover 是实际使用定位服务的设备,例如无人机、机器人或自动驾驶车辆。
这些组件共同构成 RTK 定位服务体系。
GEODNET 如何构建去中心化 RTK 网络?
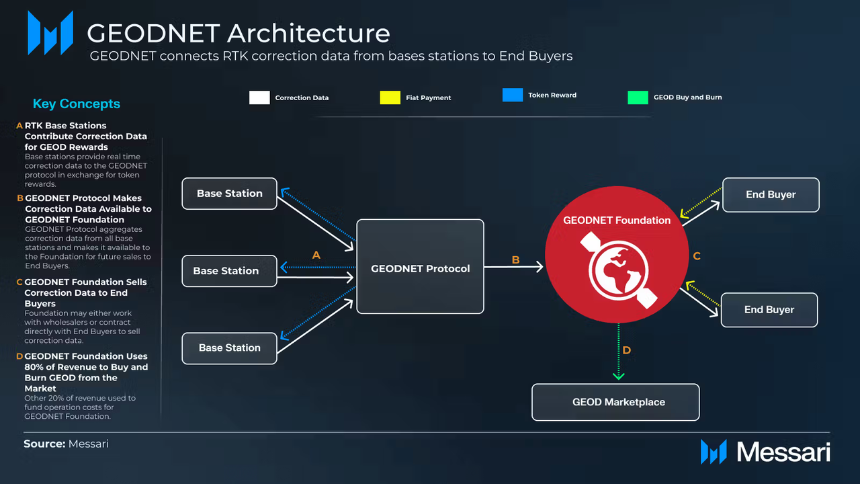
GEODNET 将传统 RTK 网络与 DePIN 模式结合,形成全球化高精度定位基础设施。与传统运营商集中建设基准站不同,GEODNET 允许全球用户部署 GNSS 基准站并接入网络。节点运营者通过提供高质量定位数据获得 GEOD 代币奖励,从而推动网络持续扩张。
这种模式降低了基础设施建设成本,同时提高了网络覆盖范围和扩展效率。随着更多节点加入网络,GEODNET 能够为更多地区提供高精度定位服务。
GEODNET 的一次 RTK 定位过程是如何完成的?
理解 GEODNET 的工作方式,可以从一次完整定位流程开始。
第一步:基准站接收卫星信号
GEODNET 节点持续接收来自多个 GNSS 系统的卫星信号。
第二步:计算实时误差
基准站根据已知坐标计算当前卫星信号误差。
第三步:生成修正数据
系统将误差转换为标准 RTK 修正信息。
第四步:发送至终端设备
修正数据通过互联网传输给无人机、机器人或车辆。
第五步:终端完成定位修正
设备利用修正数据校准卫星信号,实现厘米级定位结果。
整个过程通常在实时状态下持续进行。
RTK 技术主要应用于哪些行业?
高精度定位能力已经成为多个行业数字化转型的重要基础设施。
自动驾驶
自动驾驶车辆依赖厘米级定位完成路径规划和车道识别。
无人机测绘
测绘无人机利用 RTK 提升地图和三维模型精度。
智慧农业
自动驾驶农机和精准播种设备依赖高精度导航完成作业。
工业机器人
自主移动机器人需要准确定位实现路径控制和协同作业。
空间计算
增强现实和数字孪生系统需要精确位置数据构建现实空间模型。
RTK 技术面临哪些挑战?
RTK 虽然能够提供极高精度,但仍然受到一些现实条件限制。
首先,基准站覆盖密度会直接影响定位效果。其次,网络通信延迟可能影响修正数据实时性。此外,复杂城市环境中的遮挡和多路径效应仍可能降低定位性能。随着多频 GNSS 技术和全球基准站网络的发展,这些问题正在逐步改善。
总结
RTK 是目前应用最广泛的高精度定位技术之一,通过实时修正卫星信号误差,将普通 GNSS 定位精度从米级提升至厘米级。自动驾驶、无人机、机器人和智慧农业等行业的发展,使 RTK 成为现实世界智能设备的重要基础设施。
GEODNET 将 RTK 技术与 DePIN 模式结合,通过全球分布式基准站网络提供高精度定位服务。与传统中心化 RTK 网络相比,GEODNET 利用社区驱动的方式扩展基础设施覆盖范围,使高精度定位服务能够在更广泛的场景中得到应用。
FAQs
RTK 定位技术是什么?
RTK(实时动态定位)是一种利用基准站实时修正卫星信号误差,实现厘米级定位精度的高精度导航技术。
RTK 与 GPS 有什么区别?
GPS 是卫星导航系统,而 RTK 是利用 GPS 及其他 GNSS 信号进行误差修正的高精度定位技术。普通 GPS 精度通常为数米,而 RTK 可达到厘米级。
RTK 为什么比普通 GPS 更准确?
RTK 利用基准站实时计算并传输误差修正数据,能够消除卫星轨道误差、大气延迟等主要误差来源,因此精度显著提高。
GEODNET 使用的是什么定位技术?
GEODNET 主要基于 GNSS 和 RTK 技术,通过全球基准站网络提供实时定位修正服务,实现厘米级导航能力。
GEODNET 与传统 RTK 网络有什么区别?
GEODNET 采用 DePIN 模式,由全球社区共同部署基准站并获得代币激励;传统 RTK 网络通常由政府机构或商业运营商集中建设和维护。
哪些设备需要 RTK 定位?
无人机、自动驾驶车辆、农业机械、工业机器人、测绘设备以及部分 AR 和空间计算终端都需要 RTK 提供的高精度定位能力。